Foreword
The Applied Vehicle Technology Panel (AVT) is an international network of defence scientists and engineers dedicated to increasing the performance of new and ageing vehicles in the air, sea, land, and space domains. This network consists of about 700 experts from all fields of vehicle design, including power and propulsion, mechanical structures and material, as well as flow physics.
AVT is one of the seven panels of the Collaborative Support Office pertaining to the NATO Science and Technology Organization (STO).1 Additionally, the STO is comprised of a dedicated research centre known as the Centre of Maritime Research and Experimentation (CMRE) as well as the Office of the Chief Scientist (OCS).
Unmanned vehicles for all domains (UxV) and aspects of vehicle autonomy are an important topic in AVT’s technical portfolio. This article is based on activities performed in AVT and on contributions to a NATO Science and Technology symposium on ‘Autonomous Systems’ in fall 2014.3 The article focuses on aerial and space vehicles, while many issues and statements may also apply to land or maritime systems.
UxV-Autonomy – Definition and Issues
In the last decades, military operations have changed, to a major extent, from ‘traditional’ warfare and homeland defence to asymmetric warfare abroad. Often, belligerents are not regular armies but groups or organizations following political, ethnic or religious goals and acting sometimes as guerrillas or terrorists. Asymmetric warfare in large and often undeveloped areas as well as in urban environments implies a big risk for loss of soldiers and uninvolved civilians, a risk that is getting less and less acceptable to ‘Blue Nations’ citizens. Therefore, asymmetric military operations could be supported by unmanned systems to safely enable the application of advanced technology for ISTAR (Intelligence, Surveillance, Target Acquisition and Reconnaissance), transportation, protection and precision strikes on enemy positions / objects. These unmanned vehicles could be used not only for dangerous but also for dull and dirty tasks. Moreover, removal of the human from the vehicle removes a vast number of issues from system design and allows for smaller, lighter and more agile craft. Autonomy from an unmanned system point of view describes the capability of a platform to accomplish a pre-defined mission with or without further human interaction and / or supervision. The degree of autonomy of the unmanned system depends on the vehicles’ own abilities of sensing, analyzing, communicating, planning, decision-making, and acting (altogether forming the intelligence of the system), ranging from semi-autonomy to full-autonomy and autonomous collaboration.
The mission of a UxV and its complexity determines the required degree of autonomy of the system, and vice-versa, the technologically feasible level of autonomy may limit the operational deployment and consequently, the mission parameters. An illustration is given by the ALFUS2 (Autonomy Levels for Unmanned Systems) Model as shown in Figure 1. In this three-axis model, the autonomy level is determined by the complexity of the mission that a UxV is able to perform, the degrees of difficulty of the environment within which the UxV is to perform the mission, and the level of operator interaction that is required to perform the mission. A major challenge for unmanned system autonomy is the limitation of risk during operation. For example: in the air domain, risk is inherent with operation in civil airspace, reliable and precise target identification, decision-making for lethal actions and collateral damage.
‘Safety and Reliability’ as well as ‘Verification and Validation’ are major issues regarding unmanned vehicle autonomy. Besides fulfilling the operational requirements, UxV may have to comply with international /
national regulations inducing legal and liability issues. Related technical challenges also apply to civil developments such as driverless cars and aerial drones (e.g. for delivery of goods). Technical progress from the civil side will support and complement related military development.
Ethical concerns exist in many countries using both UxV and autonomous UxV. These concerns are based on the false public perception that autonomy is a synonym for decision-making or lethal action by an unmanned vehicle. Quite contrary to this misconception, the US National Institute of Standards and Technology (NIST) defines a fully autonomous system as being capable of accomplishing its assigned mission, within a defined scope, without human intervention while adapting to operational and environmental conditions. Furthermore, it defines a semi-autonomous system as being capable of performing autonomous operations with various levels of human interaction.4 This issue cannot be solved by technical means but must be based on political and public discussion and consensus. This significant topic is beyond the scope of this article and, therefore, will not be further treated here.
UxV Autonomy (Air and Space) – State of the Art
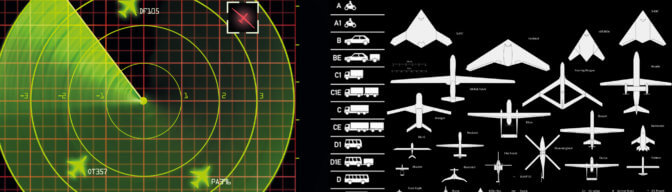
Many modern weapons feature a kind of autonomy for the whole or a part of their mission, when they fly to a pre-determined and localized target by autopilot (e.g. cruise missiles) using inertial navigation, GPS and /
or terrain mapping for guidance or when they follow and intercept a target after lock-on of the onboard seeker (e.g. air-to-air missiles). Even when those systems act fully or partly without human interaction, this feature is automation rather than autonomy. Identification / localization of the target and the decision to destroy the target are made by humans prior to the use of the weapon. Figure 2 shows categories of unmanned aerial vehicles over typical Mach numbers and altitudes of operation. Mini-UAV, small / tactical UAV, Medium and High Altitude Long Endurance UAV (MALE and HALE) are state-of-the-art and systems are operational and deployed within NATO. Micro UAV, Unmanned Combat Aerial Vehicles (UCAV) and hypersonic strike vehicles (i.e. a hypersonic cruise missile) are in a state of technology demonstration with a Technical Readiness Level (TRL)5 typically lower than seven (TRL seven means prototype demonstration in operational environment). Operational UAVs are mainly used for ISR. To a limited extent, MALE UAVs can be equipped with missiles or bombs just like a conventional piloted military aircraft. These UAV have a high degree of automation following a course which is pre-determined or commanded / altered by an operator in the Ground Control Station (GCS), again using inertial navigation and GPS. For MALE and HALE, the GCS is typically connected via a satellite link and located far outside enemy territory. Tactical UAV are typically launched by catapults or rocket boosters and return to their launch site to land remotely piloted or by parachute. MALE and HALE take off and land like a conventional aircraft and need a similar runway. They are mostly capable of automatic take-off and landing, but are typically monitored by an on-site operator. These UAV can be called semi-autonomous, when they operate on commands (e.g. course / course corrections, direction of sensors, designation of objects, destruction of targets etc.) instead of being remotely controlled, but ‘intelligence’ and decision-making is still the role of the human operator.
In particular, MALE and HALE systems may be required to operate in a non-segregated airspace at least for a part of their mission. This induces the need for autonomous actions to avoid mid-air collisions and to ensure an appropriate self-separation from other airspace users. This issue relates to safety and reliability, to verification and validation, as well as certification, and it may be a show stopper for acquisition, as recently experienced with the German EUROHAWK project. Figure 2 also shows two qualitative examples for autonomy in the ALFUS model.
The MALE mission is complex in all aspects named in the model. The environment may be complex in terms of terrain (mountain regions) or climate, but especially in terms of threat, because the vehicle speed is quite slow (around Mach 0.3) and it operates at altitudes accessible to many Air Defence systems. Accordingly, the degree of autonomy is on the lower side.
The hypersonic strike mission would be less complex and quite similar to cruise missiles today. Flight control will be more complex due to hypersonic aerodynamics and propulsion control. The hypersonic flight environment is, of course, very demanding, but threats by Air Defence should be lower. Expected autonomy will be on the higher side, covered by a smart autopilot system.
Space vehicles require some autonomous capabilities, since, depending on their orbit, they may have limited connectivity to their ground station for receiving commands. Those autonomous capabilities may include:
- Entry into a ‘safe hold’ mode in order to protect themselves from potential damage due to anomalous conditions;
- Routine operations such as momentum wheel desaturation, sensor pointing at pre-programmed targets, and similar activities;
- Propulsive maneuvers to stay in the desired orbit, that are pre-programmed and then executed autonomously.
Again, this is more about automation than autonomy in the sense of ‘intelligence’.
UxV Autonomy (Air and Space) – The Future
In the future, more and more UxV autonomy will be required to increase effectivity and to lower the workload and endangerment of humans. Figure 3 illustrates the potential future trend:
- Today, there is a man-machine interaction, wherein the human retains the main parts of command and control. The UxV performs the commanded actions based on automated routines and sends a stream of information back, which is processed at the GCS and supports the derivation of command updates.
- The next step will be a system wherein human and machine work together as a team. They act together to achieve an objective, of course, still determined by the human part. They share information and the UxV will act more independently while the human retains direction but does less monitoring and control. Technology is gradually shifting in this direction.
- A second large step into the future would be a system-of-systems approach, wherein humans and UxV work together as a group performing a joint task. Direction will still remain with the human, but the role will be similar to a commander of a unit. The UxV will act with a high degree of autonomy combined with highly complex communication. As an example, this could be a group of UCAV fighting together with some conventionally piloted aircraft and supported by ground, air, or space-based ISR assets. The operational future includes autonomous collaboration amongst different systems sharing required information for mutual situational awareness. This stage implies a large number of issues, which are not all of a technical nature and will not be achieved in the near future. The understanding of the potential of autonomous collaboration is still in its infancy.
Increasing the autonomy of UxV requires an increase of on-board capabilities for
- Situational awareness;
- Fast decision-making and response to dynamic situations and environments; and
- Communication (speed, multi party, electronic countermeasures, etc.).
Technically, this means a demand for highly enhanced on-board sensing and processing capabilities and potentially for larger data link bandwidth to cope with multi party communication. Vehicle design will have to accommodate more and larger / heavier components and a significantly increased power demand. This will necessarily lead to larger and heavier vehicles, where limitations exist for space and airborne vehicles. Also, the requirements for safety, reliability and low vulnerability will likely increase for more autonomously acting and more complex and costly UxV. This will aggravate the issues with verification and validation as well as certification. A tradeoff will have to be made between benefits from increased vehicle autonomy and competing design, cost and certification implications.
Progress in the direction of human-machine teams or systems of systems raises additional issues of:
- Shared situational perception and assessment;
- Mutual understanding of behaviour (human and machine).
Inducing problems with modelling / simulation and predictability of such scenarios being totally unresolved today. Fully autonomous systems, completely independent from human directions, are unlikely to be realized in the foreseeable future.
Moving towards more autonomous UxV will require
- Investment in critical technologies;
- Development of new policies and procedures for autonomous operations;
- A paradigm shift in operational philosophy and risk acceptance.
AVT Engagement in Platform Autonomy Topics
Figure 4 illustrates how key autonomy issues impact platform / vehicle requirements and design as outline above. The technical fields ‘Propulsion and Power Systems’, ‘Mechanical Systems, Structures and Materials’ and ‘Performance, Stability and Control, Fluid Physics’ represent the portfolio of the three technical committees of the AVT Panel. Related technical issues of vehicle autonomy (as shown in Fig. 4) are addressed in these technical committees, while other autonomy issues may fall into the portfolio of other panels of the NATO S&T Organization1.
Recent and current AVT activities in the field of UxV are listed in Table 1.
Documentation of completed activities is available for members of NATO nations on the NATO S&T Website https://www.cso.nato.int
Conclusions
Unmanned platforms will become increasingly more important for all types of operations. Tactical UAV as well as MALE and HALE systems are operational for intelligence, surveillance and reconnaissance purposes. The larger aerial systems can be weaponized and destroy identified targets. These UxV feature a high degree of automation which enables a semi-autonomous operation, while ‘intelligence’ and decision-making is retained by the human operator. The same is true for space based systems. Many issues discussed in this article also apply to land or maritime unmanned systems.
When operation of automated / autonomous UxV interferes with civil airspace (or shipping traffic), major issues arise with safety and reliability, verification and validation as well as certification.
Artificial Intelligence has to be transferred to the unmanned platform to increase the autonomous capabilities. Platform survivability is a key military capability especially for complex missions where a higher degree of autonomy is required for smart decision-making to avoid potential threats. Additional equipment for sensing, data processing, communications and power generation / power storage is needed for this purpose, with the drawback of increasing the size and mass and complexity of the unmanned platform. Moreover, the stability and control characteristics of the platform need to be precisely predicted to provide the required data for autonomous operations.
Looking in the direction of humans as part of a system-of-systems approach, operational complexity as well as predictability of such scenarios and the safety and reliability issue will pose limitations unlikely to be overcome in the near future. Various aspects of unmanned platform autonomy have been covered by activities of the AVT Panel of the NATO S&T organization. Key issues are currently addressed such as UxV certification, stability & control prediction methods as well as the assessment of system mission performance as a function of platform autonomy, which will allow a trade-off between effectiveness of operation and inherent technical and commercial investment and risk.