Introduction
In recent years, Remotely Piloted Aircraft Systems (RPAS) have been the aviation industry’s most dynamic growth sector and this trend is expected to continue. Market studies estimate that worldwide spending on RPAS will nearly double over the next decade, totalling almost $91 billion in the next ten years.1 The majority of these projected investments will be attributed to the military sector, but international companies like Google, Facebook and Amazon are also running their own RPAS programmes to suit their future requirements. However, RPAS are currently only allowed to operate in a segregated volume of airspace, which is typically restricted to other airspace users in order to avoid any danger of collision. Additionally, RPAS are usually kept away from densely populated areas, so as not to endanger humans on the ground. Nevertheless, once permitted, RPAS are expected to become a significant component within any class of airspace, presently dominated by manned aviation. Consequently, the safe integration of RPAS into non-segregated airspace is currently a key issue in the military and civil aviation community.2
There are a multitude of civil and military applications for RPAS, particularly where they appear to offer advantages, e.g. reduced risk to human personnel, extended loiter times, reduced environmental disturbance or better cost efficiency. Civilian applications may include monitoring of crops, herds, coastlines, power lines, pipelines, rivers, water reservoirs, weather or traffic. RPAS may also be of use during crime investigations, border control, aerial photography for commercial and academic purposes, logistical services or disaster control and prevention. In addition to current military applications such as intelligence, surveillance, reconnaissance, target acquisition and precision strike operations, future combat RPAS are envisioned to deliver the same performance as manned fighter aircraft and their future roles may include electronic warfare, air-to-air and air-to-ground combat. Both civilian and military applications are likely to also include research, development and testing of new RPAS, as well as education and training of their respective pilots and operators. All of the aforementioned applications eventually require RPAS to share the airspace with manned aviation. However, because the available airspace is already so congested and fragmented, vast amounts cannot simply be reserved exclusively to operate RPAS. There is, therefore, a requirement for integrating RPAS into non-segregated airspace.3,4,5,6
Challenges
In general, there are two main challenges related to the integration of RPAS into non-segregated airspace. Firstly, an international consensus about RPAS standards, classifications and, eventually, regulations is required. Secondly, RPAS have to ensure the same level of flight safety when operating alongside manned aircraft. In essence, there is both a regulatory and a technical challenge.
The Regulatory Challenge
The pre-requisite to integrate RPAS into non-segregated airspace is to define a set of internationally agreed classifications and standards for RPAS in order to shape the foundation for any further regulatory approach.
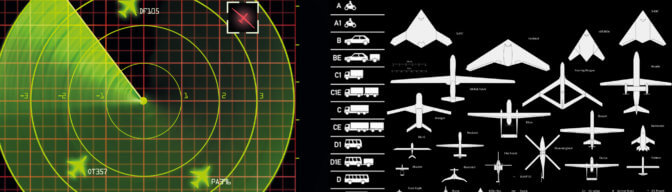
One good example of transnational consensus on commonly shared classifications and standards are the European Union’s motor vehicles and driving licence regulations. Civil as well as military ground vehicles in the EU are classified according to standard criteria (e.g. gross vehicle weight, number of axles, tracked or wheeled chassis, designated use for passenger or freight traffic). These classifications are the foundation for automobile engineering and production, vehicle registration, driver training and, ultimately, traffic regulations. Although the variations in design, types of propulsion as well as shapes and sizes of RPAS are significantly more comprehensive than with motor vehicles, (cf. Figure 1) this basic principle – regulation follows classification – could also be applied when trying to integrate RPAS into non-segregated airspace.
However, the current situation with RPAS is not even close to the level of standardization of motor vehicles. Almost 80 countries currently possess RPAS, whilst the number of countries running their own RPAS development programmes or actively trying to achieve RPAS technology can only be estimated.8,9 Most of those countries have set up their own RPAS classifications, whereas only a few have adhered to already existing standards of some sort, e.g. the NATO Unmanned Arial Systems (UAS) Classification Guide.10 Therefore, the current picture of RPAS classifications and standards is highly fragmented, formed by various types of measurements and different thresholds to distinct individual classes. Additionally, the terminology is not consistent between nations. Some nations use the phrases ‘remotely piloted’ and ‘remotely operated’ to indicate the level of qualification of the person who is controlling the aircraft, while other nations use the same terms interchangeably without any specific background or use different terminology like ‘unmanned’ or ‘uninhabited’ for their RPAS. Moreover, even within an individual nation, different RPAS classifications are sometimes established, depending on their civil, public or military application. Figure 2 illustrates an example of different RPAS classifications within some selected countries.
As with RPAS classifications, standards and terminology, national differences can be observed when considering their national airspace structures. Although most nations generally adhere to the ICAO airspace classifications, most of them do not use all airspace classes and have altered specific rules to suit their national requirements, impeding cross border operations. In consequence, the European airspace, for example, consisting of more than 50 individual national airspace structures, provides a rather fragmented picture (cf. Figure 3). The ‘Single European Sky ATM Research’ (SESAR) programme attempts to address this diversity, although it only aims at providing equipment standards for airspace class C, which is the most common class of airspace used in Europe. So, for the foreseeable future, the European airspace will stay cluttered and characterized by different national airspace structures.
The Technical Challenge
From a technical perspective, the challenges are to adapt and provide the technologies necessary to avoid mid-air collisions and to make RPAS technology compliant with nationally and internationally agreed aviation certification standards. Until now, there has simply been no need to incorporate such technologies, because recent (military) missions were conducted in segregated or military controlled airspace only.
In today’s civil airspace, several layers of procedures and technologies are in place to ensure that the risk of mid-air collisions can be almost completely ruled out. It would require failures at multiple layers for a collision to occur.11 In general, these layers can be subdivided into an outer and inner group. The outer layers ensure appropriate separation of aircraft, while the inner layers are aimed at actually avoiding a collision should inadequate separation occur.12 (cf. Figure 4, p. 44)
The outermost layer consists of the basic airspace classes and procedures defined by the ICAO and individually adapted by nations. Distinct airspace classes broadly separate aircraft by ordinal altitudes and flight directions and enforce rules for operating aircraft under Instrument Flight Rules (IFR) or Visual Flight Rules (VFR). This general airspace structure also specifies minimum standards for communication equipment and pilot qualifications.
The second outer layer provides Air Traffic Management (ATM) services and separates aircraft by Air Traffic Control (ATC) instructions. This requires aircraft to be cooperative, i.e. to identify themselves and report their position to ATC by transmitting an identification signal to the ground or via traditional radio communications. Civil systems in use are the Secondary Surveillance Radar (SSR) or the more modern Automatic Dependent Surveillance-Broadcast (ADS-B) system. The military Identification Friend or Foe (IFF) is compatible with SSR and newer versions are also compatible with ADS-B, enabling military aircraft to seamlessly integrate with the civilian ATM system.
In the third outer layer, primary surveillance radars support ATC, e.g. in the vicinity of airports. In contrast to SSR receiving only active responses from aircraft transponders, primary radars track objects using their reflected radio energy. This enables them to also track non-cooperative aircraft, i.e. aircraft which do not transmit any identification signal.
If separation of aircraft fails, the inner layers should ensure collision avoidance. In the first inner layer, the transponder signals used for reporting the aircraft’s position to ATC can be also used amongst aircraft to determine the position of other cooperative airspace users and give notification of potentially conflicting flight trajectories.13
In the second inner layer, the Traffic Alert and Collision Avoidance System (TCAS) alerts the pilot of a possible collision and suggests a coordinated manoeuvre to avoid it. TCAS is not an automated system, i.e. it still requires the Pilot in Command (PIC) to actively manoeuvre the aircraft out of the potential hazard area. Moreover, TCAS requires that both conflicting aircraft have transponders, otherwise no alert is given.14
All of the previously described layers require aircraft to be cooperative, i.e. to transmit an identification signal to other airspace users and to the ATM services. Non-cooperative airspace users which do not transmit any identification signal cannot be detected unless they are tracked by primary ground radars. Most aircraft do not have primary radar on board, therefore the innermost layer relies on the pilot’s ability to literally see other non-cooperative air traffic and avoid it as necessary. This requirement is a fundamental principle of flight safety and specified in the ‘Rules of the Air’ laid out by ICAO Annex 2 as follows:
‘An aircraft shall not be operated in such proximity to other aircraft as to create a collision hazard. […] It is important that vigilance for the purpose of detecting potential collisions be exercised on board an aircraft, regardless of the type of flight or the class of airspace in which the aircraft is operating.’
However, with regard to ICAO Annex 2 and in contrast to manned aviation, separation assurance and collision avoidance for RPAS have their own unique challenges. Regarding separation from other air traffic, which is conducted in the three outer layers, aircraft have to be cooperative by broadcasting an identification signal, and have to be able to communicate with ATM services to follow ATC instructions. Military Medium- and High-Altitude Long-Endurance (MALE / HALE) RPAS can be expected to have an IFF transponder equipped to integrate them into military operations, so the requirements to be compliant with the three outer layers and ensuring separation of RPAS from other aircraft are basically met.
With collision avoidance it is more difficult. RPAS are controlled remotely via a Command and Control (C2) radio link between the Ground Control Station (GCS) and the Remotely Piloted Aircraft (RPA), which may even be relayed via an orbiting satellite for Beyond Line of Sight (BLOS) operations. Because there is no pilot on board the RPAS, disruption of that C2 link will result in loss of direct control of the aircraft. However, the inner layers providing collision avoidance still require the pilot to be able to actively control the aircraft to manoeuvre it out of the hazard area, since current collision avoidance systems like TCAS do not offer any automated functions. This means that collision avoidance of RPAS is currently dependent on a reliable C2 link. At the innermost layer, RPAS lack the ability to see and avoid other air traffic because the relayed camera picture of the sensor provides only a fraction of the field of view, resolution and image depth as it would be sensed with own eyes by an on-board pilot. Additionally, the problem of C2 link disruption will also apply.
Current RPAS Detect, Sense and Avoid Developments
Currently, approved mitigation strategies include using either a ground-based observer or an observer on-board a chase aircraft. However, these solutions are unlikely to be practical for all RPAS missions. In order for routine RPAS operations in non-segregated airspace, operators must ensure that they can manoeuvre the aircraft as safely as traditional, manned aircraft pilots. As discussed, separation of RPAS from other cooperative aircraft is technically already feasible, assuming that RPAS have a military IFF transponder equipped. To mitigate or provide an alternate means of compliance to the ICAO Annex 2 ‘See and Avoid’ regulations, two concepts are currently in development, addressing the separation and collision avoidance issue with non-cooperative aircraft. These are Ground-Based Sense and Avoid (GBSAA) and Airborne Sense and Avoid (ABSAA).
GBSAA utilizes ground-based, primary radar platforms to enable RPA operators to share common situational awareness about the relevant airspace and be alerted to potential conflict events with other aircraft. It detects airborne traffic, tracks the path of non-cooperative airspace users and provides a visualization of nearby air traffic to the RPAS operator. GBSAA also mitigates the problem of C2 link disruption by establishing an additional, independent link between the ground-based primary radar and the GCS. Because of this, the operator is always provided with an accurate trajectory of the RPA, even if the C2 link is lost. The RPA will still be out of direct human control and not manoeuvrable, but at least other air traffic can be warned and separated if necessary. However, GBSAA can only provide coordination between piloted and unmanned aircraft within limited geographic regions and air spaces.16,17,18
ABSAA is intended to act as a replacement for the see and avoid capability of the pilot on-board a manned aircraft, something which is unachievable with purely ground-based systems. An ABSAA system must therefore provide the same level of performance and integrity as a human pilot. Providing that level of performance in all-weather conditions, by day and night, strongly points to an on-board radar solution. Current ABSAA radars are capable of providing coverage of up to 220° in azimuth and 30° in elevation, which is roughly comparable to the field of view of an on-board pilot. However, these types of radars require a significant portion of the RPAS’ available Size, Weight and Power (SWaP), which limits their use to larger systems.19,20
Both concepts, GBSAA as well as ABSAA, are still in development and testing and are not yet certified. The United States Department of Transportation proposed GBSAA as a short-term solution to begin operating RPAS in US airspace. The US Army also aims to conduct their MQ-1C ‘Gray Eagle’ training flights within the US using GBSAA.21 Therefore it is likely that GBSAA-assisted RPAS will be the first ones to be allowed to operate in non-segregated airspace, although only as an interim solution until ABSAA systems have matured enough to be certified.
Summary
Integrating RPAS in non-segregated airspace is a complex topic, which includes airworthiness standards, pilot certifications, aviation regulations and procedures as well as technical challenges unique to remotely controlled aircraft. This document has highlighted two of these challenges, assessing them to be crucial for the way ahead and to be addressed first and foremost.
Commonly agreed standards and classifications of RPAS are the fundamental basis of any further regulatory approach on an international level. There are many national initiatives aiming to integrate RPAS into non-segregated airspace, resulting in a variety of standards and classifications. Although NATO and EU member states have jointly agreed on a common RPAS classification table for their military systems, most civil aviation authorities have not adopted them. To overcome this issue, future RPAS standards and classification have to include the civil as well as the military domain and have to be mutually agreed on by the military and civil authorities of all NATO and EU member states.
Compliance with the ICAO Annex 2 ‘See and Avoid’ regulations is the central technical challenge which has to be addressed if RPAS are to be integrated into non-segregated airspace. The multi-layered approach (separation of aircraft on the outer layers and collision avoidance on the inner layers) must be complemented by an RPAS-specific ‘core’ layer, e.g. providing pre-defined evasive flight manoeuvres in case of delayed human responsiveness, signal latency or disruption of the C2 data link. GBSAA systems may support the integration of RPAS into non-segregated airspace, but they are limited to a specific geographical area, depending on their radar coverage. Additionally, GBSAA systems only provide situational awareness to separate RPAS from other aircraft; they cannot provide collision avoidance. Conclusively, collision avoidance of RPAS will eventually require an automated ABSAA system, intended for such cases where active control of the aircraft is lost (Figure 4). Finally, RPAS which cannot be fitted with an ABSAA system due to their SWaP restrictions and cannot therefore be compliant with the ICAO Annex 2 ‘See and Avoid’ regulations will still have to be confined to a segregated volume of airspace or have to stick to current regulations for model aircraft, preventing them from interfering with other airspace users.
Despite many advances, RPAS are still in their infancy. The current state of development is often compared to the point at which the Wright Flyer first took to the air in 1903. Academia, industry, regulatory authorities as well as the military are working diligently to integrate RPAS into the civilian airspace. The time has now come to combine these efforts.