Introduction
In the next decade, a number of nations will replace or update their current helicopter fleets.1 Aware of this, the NATO community has set up different working/study groups, to determine the requirements for the new generation of combat/transport helicopters. Manned-Unmanned Teaming (MUM-T) capability could be one of these requirements. The technology and the capabilities offered by the MUM-T concept may likely revolutionize not only the way in which future aircraft might be developed, but perhaps even how future warfare might be conducted. This article provides an overview of the MUM-T concept. It explores opportunities and capabilities, and analyses aeromedical and human factors challenges which could be posed by the increased pilot’s workload on manned platforms when operating in a MUM-T environment; factors that could influence the development of new concepts of the Human-Machine Interface (HMI).
What is MUM-T?
During the 2013 MUM-T Strategy Brief, the United States Army Aviation Centre (USAACE) defined MUM-T as: ‘The synchronized employment of soldier, manned and unmanned air and ground vehicles, robotics, and sensors to achieve enhanced situational understanding, greater lethality, and improved survivability.’2 Donald Woldhuis and Michael Spencer explain MUM-T as ‘a standardized systems architecture and communications protocol that enables live and still images gained from the sensor payloads of Unmanned Aerial Systems (UAS) to be shared across a force’.3 Through the use of sophisticated data links, MUM-T lets the manned platforms connect with UAS at different Levels of Interoperability (LOI). This makes it possible for both manned aircraft and ground forces to share the UAS’s products. This opportunity may enhance decision-making and mission effectiveness, offering new different tactical chances which could make a difference in the development of future strategies. In simple terms, MUM-T offers a new LOI between ground forces, manned aircraft, and UAS.
Opportunities and Capabilities
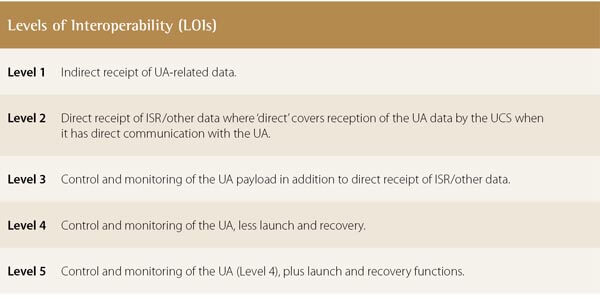
In the rotary wing domain, the Attack Helicopter AH-64E could be considered to be one of the most advanced MUM-T platforms. Able to perform from LOI-2 to LOI-4 (Table 1), it not only receives videos from Unmanned Aircraft (UA), but can also control the UA’s sensors and navigation profile.4 The imagery could be provided to the infantry and Joint Terminal Attack Controllers (JTAC), supporting the need for tactical information collection of joint force leaders, and increasing tactical Situational Awareness (SA).5 MUM-T offers the opportunity to know what is happening on the ground, what the target looks like, and what the terrain looks like, all before you get there, while still far away from the danger zone. It offers the possibility to provide the involved actors with the same picture. The capability for the helicopter crews, to assume control of the UA or its payload, and to autonomously manage the imagery collection needed to accomplish the given mission, without going through a third-party operator, could lead to a drastic reduction of the communication necessary to positively identify a target and to determine the positions of friendly forces and neutral entities on the ground. These are aspects which might avoid break downs in communication due to language barriers and which reduce the risk of errors, misunderstandings or misidentification of a target. The opportunities and capabilities offered by the MUM-T concept depend significantly on the possible roles which a UA could assume when teamed with a manned aircraft. In a recent study, Allied Command Transformation (ACT) examined some of these possible roles.6 A UA can be used as a sensor to feed information to the manned aircraft. It can also be considered as a Weapons Delivery (WD) platform, capable of launching ordnance. Coupled with a manned aircraft, a UA can be used as a decoy, either attracting the opponent’s weaponry or distracting the enemy to allow the manned platform to proceed undetected, increasing their security bubble as much as possible. Electronic attack (EA) could be considered, too. Teamed with this role, a UA could emit electromagnetic energy to overwhelm, confuse, deceive or otherwise render ineffective the radar system of an enemy counterpart. A Search and Rescue (SAR) payload could be a possible UA role. A UA could be driven by a manned aircraft and used to drop supplies for a rescue mission (e.g., food, medicine).7 MUM-T has the potential to offer a variety of opportunities, which, combined with up-to-date Tactics, Techniques, and Procedures (TTP), could furnish improved and augmented tactical SA during all phases of a mission and could enhance the lethality of the manned platforms and improve their survival chances.
Interoperability
The number of different types of unmanned systems being used in different domains will increase significantly in the future. In the civil sector, for example, it is estimated that the global market related to unmanned aircraft could reach approximately USD 14 billion in 2026, a 300% increase compared to 2017.8 In this complex and continuously evolving technological scenario, the assurance of interoperability between different manned/unmanned systems available to the NATO community represents a growing problem. UAS are designed and procured nationally.9 They are usually built using unique and specific systems which do not ensure a common interface. ‘Commonality of hardware and software would be a solution to achieve interoperability, but the commonality is not mandatory’ within the NATO community.10 The result is an increasing number of non-interoperable systems. NATO responded to interoperability requirements in 2004 by ratifying the first edition of Standardization Agreement 4586 (STANAG 4586 – Standard Interfaces of Unmanned Aircraft (UA) control system (UCS) for NATO UA interoperability), of which edition 4 is currently effective.11 STANAG 4586 does not provide a complete solution but, as stated by Mário Monteiro Marques in the conclusion of his study: ‘It is certainly a crucial step taken in that direction, providing a roadmap for future development.’12 Considering that commonality is not mandatory within NATO, convergence on a common roadmap should represent a valid solution for developing interoperable and connectable systems.
Human Factors and Aeromedical Challenges
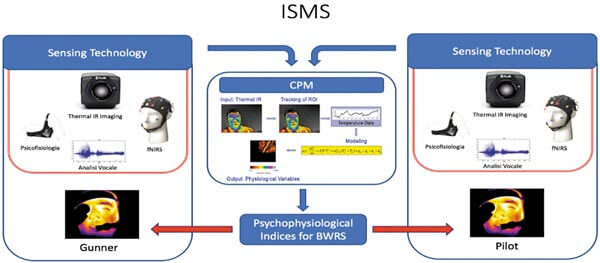
Task saturation and excessive workload may become a serious problem for pilots of manned platforms, when teamed with a UA, performing a MUM-T mission. In 2015 the United States Army Aeromedical Research Laboratory (USAARL) focused on this issue and conducted a study analyzing Human Factors (HF) and aeromedical challenges which could be posed by MUM-T applications.13 The study highlighted the absolute necessity of remaining vigilant. As indicated by USAARL, some of the possible problems that pilots might face when operating in MUM-T mode include visual overload, increased workload, task saturation, distraction and decreased ‘flying’ SA, as well as motion sickness. Moreover, USAARL warns that processing conflicting sensory information (between aerial platform motion cues and UA orientation), and other consequences of increased UA interoperability in the cockpit, may increase the risk of Spatial Disorientation (SD). The USAARL distinguishes between ‘battlefield’ or ‘target’ SA, and ‘flying’ SA. MUM-T could increase the first, but USAARL raises the fundamental question that this might result in decreased ‘flying’ SA, as a cost. In light of the above, the aviation medical community should be involved, more than ever, in the development cycle of future MUM-T capable aircraft, providing, guidance, and expertise. Analyzing HF and aeromedical challenges posed by MUM-T applications, it would be desirable to have a holistic and comprehensive approach to involve the essential actors: not only aviation medical community but also the scientific community, research entities, and industry. In 2012 Tobias Paul and Emanuel Brämer investigated the MUM-T concept and highlighted the necessity of additional and enhanced systems in the cockpit of the manned platforms, to allow successful teaming with a UA.14 The systems should reduce the pilot workload to an acceptable level while providing them with appropriate SA. Enhanced HMI for task assignment, presentation of UA status, and presentation of task results, was one of the crucial components to be realized15. In this context, the Helicopter Division of Leonardo is developing a new objective methodology which can evaluate the effectiveness of the HMI called Infrared Stress Monitoring System (ISMS).16 This project is ‘aimed at validating metrics based on psycho-physiological indexes, to evaluate the real-time objective crew workload throughout their cognitive and stress behaviour and indexes’.17 Recognizing and mitigating the potential for performance degradation, errors, and accidents caused by HF and aeromedical risks has always been paramount in aircraft design and development. This perspective is particularly relevant in the development of MUM-T technology applied to manned aerial platforms. Exploring new methods of HMI which facilitate natural and efficient interaction, while reducing pilot workload as much as possible, could represent a truly essential element in the evolution of the new/next generation of MUM-T capable aircraft.
Conclusions and Recommendations
MUM-T can be described as a new combat strategy. It could enhance tactical SA and the lethality of the manned platforms while improving their survival chances. It is a relatively new technology which aims to synchronize the employment of the actors involved (soldiers, manned and unmanned air and ground vehicles, robotics and sensor). The innovative concept of action could revolutionize the planning and conduct of warfare in the future. Some challenges need to be addressed, and some problems to be solved before creating a valid and reliable tool for NATO. First, in the development of the technologies applied to MUM-T, particular importance has to be given to the concept of interoperability. The convergence on a common roadmap, by all the countries involved, should represent a valid solution for developing interoperable and connectable systems. This could ensure tactical and strategic advantages for commanders in the future, providing different coupling options between available MUM-T platforms within NATO. Second, the accurate and scientific study of HF and aeromedical issues/risks/threats posed by MUM-T applications are crucial in the design and development of future aircraft. A holistic and comprehensive approach from the involved actors is desirable to face the challenges. An objective analysis of the crew’s workload could be useful in supporting the cockpit design of the new aircraft and driving the development of new HMI concepts. These concepts could help to find the right way to display the essential data needed by the pilots, without exceeding their human limits. In conclusion: the MUM-T strategy enhances Air to Land Integration at tactical level, by putting air and ground forces quite literally in the same picture. With due respect for the multiple technological challenges it implies, could be considered a great opportunity, which the NATO community needs to assess carefully.