Introduction
As technology evolves, the technical options and consequently the military applications for unmanned aircraft become more diverse. Theoretically, every manned system could be construed as an unmanned version. But the lack of necessity for a pilot to be in the system gives engineers options, which were not fathomable before. However, from an Air Defence (AD) perspective manned and unmanned aircraft are ‘effect delivery platforms’ and the delivery of their effects needs to be prevented. This chapter will highlight a lot of the similarities with traditional AD, but will also emphasize the problem’s complexities and additional options for dealing with this constantly evolving threat.
Why are Unmanned Aircraft Systems Different to Traditional Air Threats?
The main difference between UAS and regular aerial systems is the fact that the UA itself has no human pilot on board. If this were the only difference, the current requirements for AD would not change. However, the fact that the pilot is not part of the actual airframe or not necessary at all allows for new categories of aircraft and also allows for new ways of using a UA with new or enhanced employment methods.
Not having a pilot on-board allows developers to perform systems engineering with a far more mission-centric mindset than before. Not only does a pilot impose a minimum size requirement for airframes, but it is also a biological limiter, affecting overall dwell-time, system robustness and even expendability. However, according to the principle ‘form follows function’, UA will have to have a certain size, weight, and flight altitude to fulfil their mission. For example, a 10 kg UA flying at 20 km altitude for 24 hours, carrying high-resolution cameras or air-to-ground missiles is technically not feasible. That means a certain kind of UA can be expected for a certain type of mission.
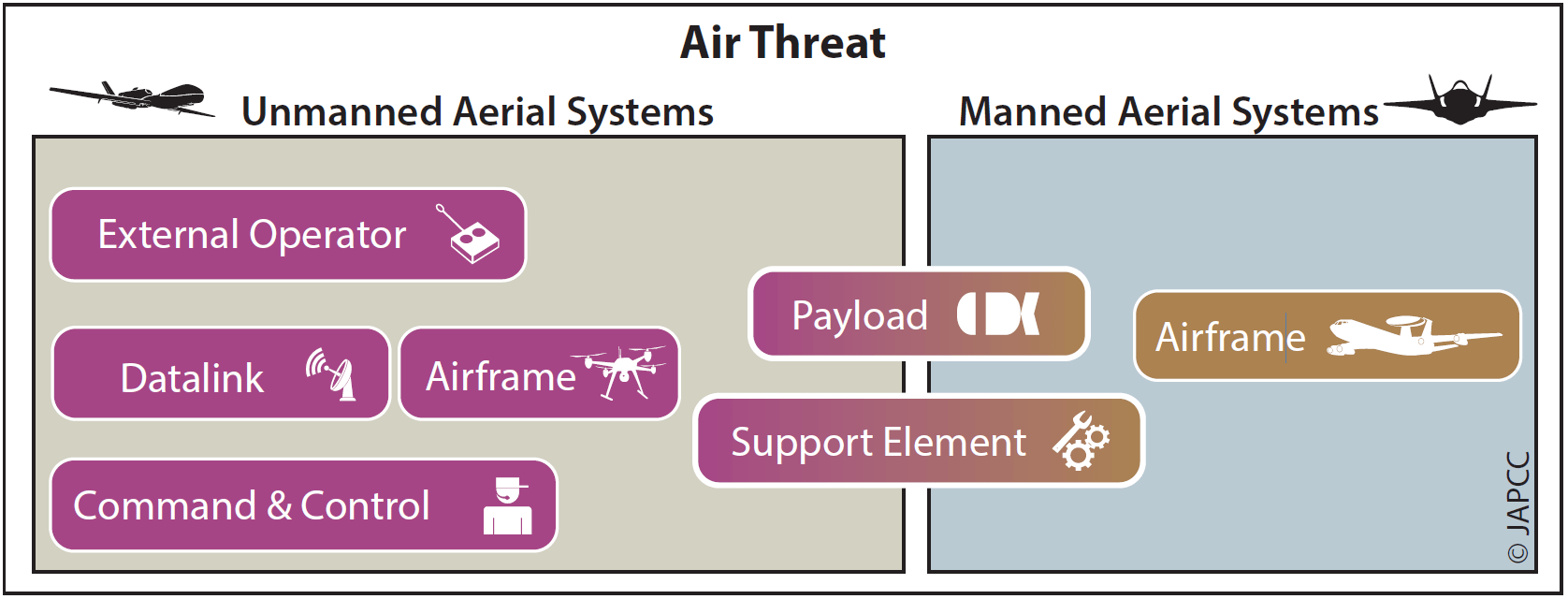
However, from an AD perspective, the main objective is to prevent the delivery of effects by adversary air threats. For this, the airframe or the payload needs to be targeted in the air, on the ground or its logistic support needs to be negated. For each option, there is a so-called kill chain following the F2T2EA (Find, Fix, Track, Target, Engage, Assess) logic.
Kill Chain
The United States of America developed the F2T2EA kill chain model inspired by General Ronald R. Fogleman.1 Analysing the six steps defined by their keywords will shed some light on the question of how the kill chain works, and why there are additional options for UA defence.
Find. This is the initial element to start the entire process. Information collection in regards to Intelligence, Surveillance and Reconnaissance (ISR) to provide a proper Joint Intelligence Preparation of the Operational Environment (JIPOE) is obligatory to be sufficiently informed about the expected threat. In parts, this has to take place long before an actual C-UAS operation, but the theoretical planning process to develop defensive reactions is based on these prerequisites; on a practical note, sufficient surveillance is considered to be obligatory. Before thinking about any active defensive actions, it is mandatory to ‘find’ targets. Sensors (e.g. radars, but also optical and acoustic systems) are required to detect any air targets. Sensor requirements for UA, which are similar to known air threats, should be satisfied by existing systems. Although, the smaller the UA and lower the flight altitude, the more complex it will be to reliably execute the first step of the kill chain with Surface-Based Air and Missile Defence (SBAMD) sensors. Therefore, finding UA before they are airborne could significantly enhance SBAMD operations, at least in passive defence terms.
Fix. The meaning of fix in the AD domain is to identify the detected air targets. This will contribute to proper situational awareness (SA) and allow valid and consequent decision-making. This becomes especially problematic, but very important in peacetime, due to the massive increase of private or recreational UA.
Track. Tracking the identified radar contact is mandatory to continue the dynamic decision-making process. In relation to the track history and the current track behaviour, military leaders are capable of prioritizing or retaining attack options. Individual tracks may be sorted and allocated to weapon systems, which directly leads to the next step.
Target. Final coordination including the reassurance of the correct classification and identification is going to lead into the final approval for engagement under consideration of all applicable laws and Rules of Engagement (ROE).
Engage. The allocated weapon system is ready to fire and will receive the engagement order. Like with other air threats against UAS, this process will work in all modes of operation, depending on the individual situation and UA.
Assess. The last step in the kill chain is the assessment of engagement success. The outcome of this assessment could be an all-clear, a re-engagement or the alerting of threatened sites.
Additional Options to Counter Unmanned Aircraft Systems
As previously mentioned, for regular manned air threats the kill chain can be aimed at the aircraft, the payload or the logistical backbone. When dealing with UAS, three more target options arise. These are the control element, the human operator or the control link/mechanism.
Every individual target option requires an additional kill chain, which enables the suppression of the UAS’ mission, in several cases even without physically destroying the aerial vehicle itself. Also, smaller UA might only have a very short-range and therefore will be launched well inside of any SBAMD sensor envelope, reducing available time for SBAMD systems to react. In this case, the initial act of finding a UA before it ever becomes airborne is critical. However, there are also options in how SBAMD systems can support these potential kill chains with existing or potentially added capabilities, which will be described later.
Surface-Based Air and Missile Defence Role in Countering Unmanned Aircraft Systems
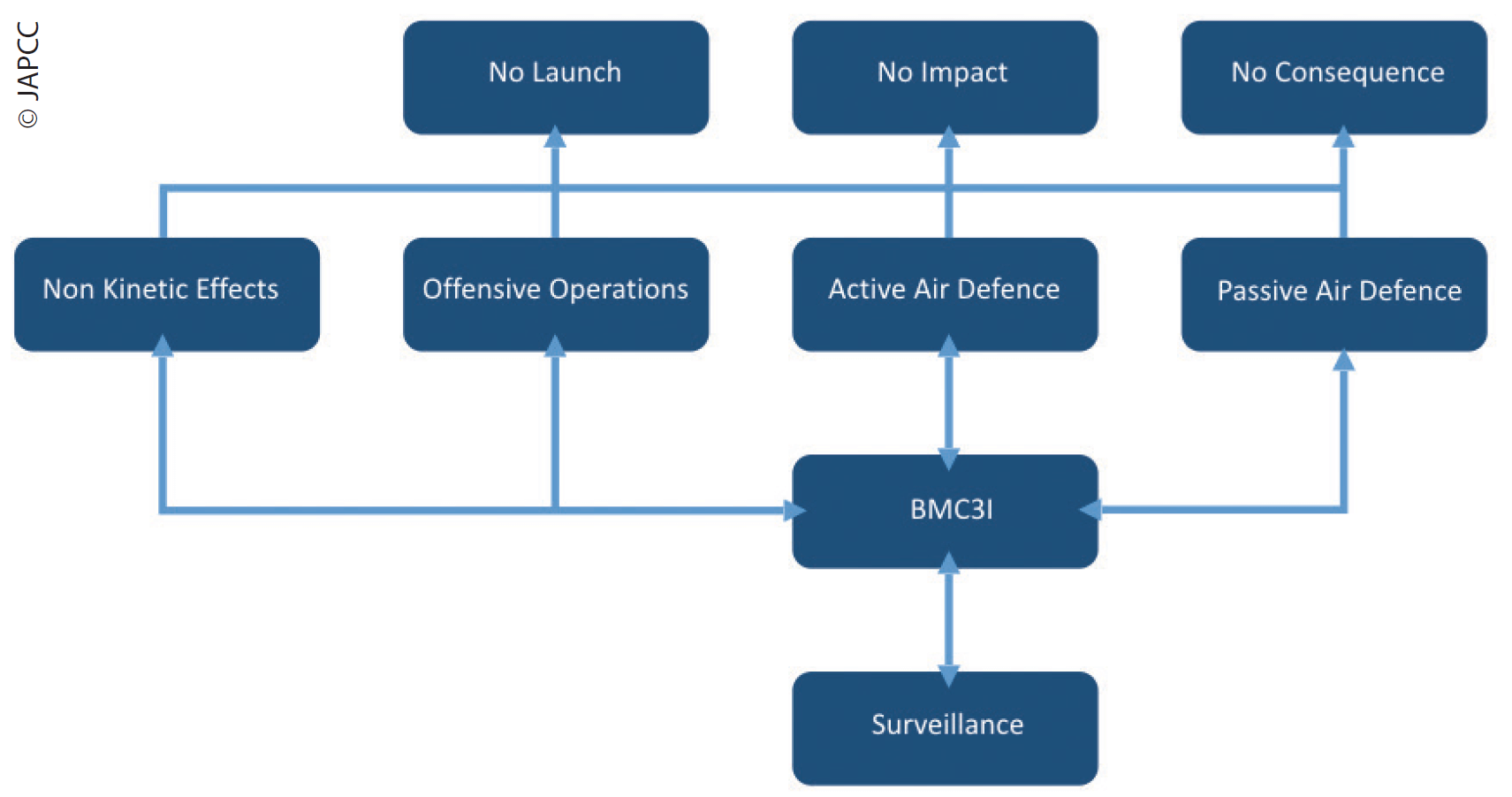
The role of SBAMD can be defined in various contexts. SBAMD systems are part of NATO´s Defensive Counter-Air (DCA) strategy. DCA consists of all active and passive AD operations to detect, identify, intercept and destroy or render ineffective, adversary air and missile forces attempting to attack or penetrate friendly airspace.2 As part of DCA, NATO employs the NATO Integrated Air and Missile Defence System (NATINAMDS), which is very important for controlling NATO’s airspace and protecting against ballistic missiles. NATO IAMD has four pillars; Active Air Defence, Passive Air Defence, Surveillance and Battle Management, Command, Control, Communications and Intelligence (BMC3I). In both constructs, SBAMD forces can be used in a pre-planned defence design or a more reactive self-defence centric role (e.g. protecting manoeuvring forces). Another distinction of SBAMD forces is the characteristics of the ‘to be protected’ asset. The main differences are between area and point defence and stationery versus moving assets. Every SBAMD system is a combination of Sensor, Shooter and Command and Control (C2) elements. Two facts that have to be considered are, not every track that can be seen can be engaged and not every track that is in engagement distance for the effector can be seen. The resulting effective space, where an SBAMD unit can deliver its effect, is called battlespace. However, it is imperative that the C2 mechanisms, the underlying ROE, and the delegated rights to execute the kill chain (including engagement/neutralisation) are readily available and appropriately delegated. In the overall scheme of deterrence, SBAMD means can be used to deny the adversary their ability to deliver effects with UAS, but as will be shown later, they can also be used to inform other means of mitigating the UAS threat.
The picture emphasizes, that SBAMD, as part of active AD, is mainly aimed at the UA or potentially larger payloads (e.g. missiles or bombs) while inflight is only one way to interrupt the application of the entire UAS. However, SBAMD should not be seen in isolation. Through an optimized system of overarching BMC3I, the effectiveness and efficiency against UAS can be optimized.
To describe the role of SBAMD systems and the necessary framework, it is essential to identify the function of the SBAMD force and the anticipated threat. In NATO, UA are classified into three categories.
- Class I: Small UA less than 150 kg; Mini UA less than 15 kg
- Class II: Tactical UA up to 600 kg
- Class III: HALE/MALEi larger than 600 kg
These are categories based only on one parameter, but for a large part of UA, weight can directly correlate to size, possible lift, propulsion and therefore maximum altitude, payload, speed and function.
Class III
A significant subset of Class III UA is basically ‘regular aircraft’ without a pilot in the airframe, hence they can be mainly dealt with within the framework of available AD. Since current Class III UA like the MQ-1 ‘Predator’ or RQ-4 ‘Global Hawk’ are very large and relatively slow, finding them in the airspace with available sensors should not be more complicated than finding comparable manned aircraft. Also identifying them is possible with already available means (e.g. IFF, Airspace Control Means). As targets, they are well within the capabilities of available interceptors or Medium-Range (MR) and Long-Range (LR) SBAD units. Some Class III UA might be harder to intercept than others, e.g. rotary UA in comparison to Global Hawk, but the qualitative difference to comparable regular air threats seems minimal.
Also, existing threats like some Cruise Missiles (CM) seem to fulfil the criteria of Class III UA. These threats were never manned but developed to outmanoeuvre the battlespace of existing SBAMD systems. The battlespace is the volume of airspace, where an SBAMD system can intercept a target, mainly based on the sensor, interceptor and threat characteristics. It is commonly depicted as a half-sphere, which is somewhat idealistic since it rapidly decreases with the flight time of the interceptor. With increased agility of the target, the intercept probability will decline significantly. The best way for a threat to penetrate a battlespace is to have a combination of parameters, mainly speed, altitude and Radar Cross Section (RCS), for which the SBAMD system is not designed. CM employ very low or very high flight profiles with manoeuvring capabilities to minimize contact time with SBAMD battlespace. By removing the pilot from the aircraft, the biological limitation to physical forces by the human itself is not present, so for a UA, this will be even easier to achieve. Also, heavy attrition of the airframes without a pilot becomes less of a problem and having the UA as an ordnance, like a cruise missile, becomes more of a benefit. This creates UA employment options which could significantly weaken SBAMD defence designs.
Newer UA concepts like ‘pseudo satellites’, which are by dimension comparable to Class III UA, but can by weight be in all three classes, fly at an altitude above 60,000 ft. Most of the SBAMD effectors might be significantly challenged to reach such altitudes. Also, such interceptors are relatively expensive, so the cost-benefit ratio has to be considered.
Class II and I
For most systems below Class III UA, there are no manned equivalents. Here, we can find relatively new types of threats, which create new challenges for existing SBAMD systems and ideas. UA can be much smaller and can have different forms/formats than conventional manned threats. This puts stressors on all links of a potential kill chain.
As mentioned before, every sensor works within an anticipated framework of threat parameters which are mainly RCS, speed, altitude and manoeuvrability. Designing unmanned systems allows these parameters to be challenged, which might create a requirement for new sensors, effectors and C2 structures/processes.
RCS: Having the opportunity to miniaturize systems, also allows for a significant reduction of the RCS. Shapes of aircraft without pilots on board create better RCS design options as well. Indeed, mission requirements with impact on the RCS, like range or altitude, will have to be considered in UA design, but it still allows for more flexibility for the developers.
Speed, Altitude and Manoeuvrability: Of course, the human in the system is a significant limiting factor of how the system can behave in the third dimension. High altitudes require life support systems, which can make such a system too expensive or large. Due to high G-forces, a manned system cannot perform flight patterns beyond certain speeds or manoeuvre thresholds. These are not limiting factors for UA.
Every SBAMD system needs to find, fix and track a potential threat before it can be targeted and engaged. The smaller the RCS of a UA gets, the harder this process will be and the closer a target needs to come to the sensor to produce usable signal returns. Airborne sensors might be considered for area UA surveillance, but in general measuring against the ground, especially small targets in possibly congested environments can prove very difficult. However, RCS only speaks to radar energy and is very frequency dependant, so there might be other means of successfully sensing or supporting existing sensors. Optical sensors in the visual, infrared (IR) and ultraviolet (UV) bandwidth might be able to detect UA. Additionally, acoustic sensors might support RF (radio frequency) or optical sensing. Both acoustic and optical sensors have relatively short ranges compared to radar sensors. Class II and I UA are normally not long-range systems and the smaller the UA, the lower the flight ceiling. This means that due to their operations at lower flight lev-els, possible stop-and-drop flights and very agile flight paths, these classes impede C-UAS area defences. The lower a UA flies, the more impact the surrounding environment has on the sensor coverage, especially sensor data that could lead to a successful engagement. The same issue generally applies to helicopter defence within typical AD scenarios. The effective reach a C-UAS effector has for Class I and a large subset of class II is very limited; therefore, the launching point will be relatively close to the intercept point. (Specific ranges are heavily dependent on the individual UA.) The result is a reduction of the ability to execute area AD with shrinking UA size, leading to a potential reduction to pure point defence. In regular AD, the term ‘point’ refers to individual assets that need protection, which in this case could be an individual person. This consequently results in the requirement for a very high number of C-UAS sensors and effectors, or at least a rigorous prioritization of the assets that need protection. Also, concepts of extended self-defence, where individual units assist each other in the exercise of self-defence, become more complicated.
Surface-Based Air and Missile Defence Components
In NATO terminology SBAMD systems are divided into long, medium, short and very short-range systems. This separation was made having air and layered defence in mind. The lower the effective range of the specific system, the more often it can be found in a mobile, self- or asset defence role. Currently, there are no universal AD systems to cover all air threats. The overall functionality is mainly defined by the available sensors, effectors, and C2 systems. Since SBAMD systems are designed to cover specific subsets of the known or emerging air threat, it needs to be identified how much UA are included and where new solutions need to be found.
Sensors
The longer the range AD systems have to survey, the larger the overall volume of airspace they need to cover. Therefore, modern systems have sensors with very sophisticated volume management to optimize surveillance and tracking in accordance with their specific mission. Some systems have separate surveillance radars or rely on other external sensor sources, which cue the tracking/engagement radars to reduce the overall workload and decrease reaction times. This improves the chance a target gets acquired in a timely manner and that the system can maintain the track over time. In general, targets need to be within a certain spectrum of altitude, speed, RCS and manoeuvrability for a sensor to be able to handle it. Modern surveillance and tracking radars are scanning the air volume in a ‘smart’ way, meaning the volume gets searched in accordance with the likelihood of a target being present. Also, tracking is supported by a flight path prediction of the individual target. This requires knowledge about the airframes to develop these supportive algorithms. UA, when supported by Artificial Intelligence (AI) guidance and on-board sensors, can lessen the benefits of these sensor algorithms. This will make it harder to search and track targets until the algorithms are updated in accordance with reliable UA threat data, which highlights the need for accurate intelligence data about the UA threat.
As with other air threats, certain UA require specific sensors. Class III UA like High-/Medium-Altitude Long-Endurance (HALE or MALE) UA fly relatively high between 15,000 ft and 60,000 ft with a moderate speed and a large RCS. For long-range surveillance or tracking sensors (e.g. PATRIOT, S-400) this class of UA should not be a challenge to detect. Even for modern medium-range sensors, these airframes should be easy to acquire and track, but at a reduced range. However, since Class III incorporates all UA with a weight over 600 kg, larger rotary-wing designs are included. Hence, the same problems as with helicopter defence for medium and long-range SBAMD units occur. Rotary-wing aircraft can use topography to deny or hinder sensor acquisition and tracking. Also, successful guidance of an interceptor to the target gets more complicated due to terrain masking and RF signal interference with the surface. Short-range sensors very likely do not have the range to be used for HALE or MALE but are sufficient for lower flying UA of Class III, since the RCS is significant and the short-range limits the effect of topography in relative terms.
Below Class III UA, sensors will have a much harder time acquiring and maintaining a track. Of course, the lighter the UA gets, the smaller the RCS could be, especially because larger fractions of smaller UA can be made out of materials that are less RF reflective. Also, the smaller the UA get, the lower they will fly, which reduces the effective range a sensor could acquire and maintain a track. This is especially true for rotary-wing designs, in which a stop-and-drop or rapid direction-changing flight pattern make it harder for regular AD radars to maintain a track. The later a sensor can produce a consistent track that could potentially be engaged, the smaller the protected areas become and the more point or self-defence centric the SBAMD capabilities will be used.
Modern AD radar sensors are extremely capable and their search patterns are software definable, which would allow their use against smaller UA when programmed accordingly. However, the smaller the UA and the shorter the range, the more reasonable and inevitable it becomes to use specifically designed UA sensors for target detection. These systems will be smaller, cheaper and far more flexible for use, especially in a self-defence environment. Also, in this short or very short-range scenario, other sensors (e.g. optical and acoustical) can be employed to support a potential kill chain or to warn military or civilian personnel.
Also, the wavelength, pulse compositions or dwell times of radar sensors needs to be looked at as well. Current AD sensors are optimized against known air threats. It needs to be analyzed, in which subsets of UA they are effective against as well. UA will introduce the possibility of using swarming techniques for attacking targets. Analysis should be conducted in order to identify which kind of sensors are capable of providing adequate SA of large UA swarms, flying close to each other. Also, these sensors need to be capable of delivering fire solutions for suitable interceptors or other means of engagement.
However, emitting RF energy also increases the vulnerability of the SBAMD unit itself. As can be seen in the development of the Israeli Harpy UA family, which uses RF emissions of SBAMD sensors as guidance for their targeting. While the Harpy UA only had an RF seeker to target active radar sensors, the Harop and Mini Harpy both have optical (electro-optical and IR) sensors, which allow them to target even non-radiating systems. Modern systems in-crease their survivability by frequency management, agility and diversity, as well as the use of dispersion or various camouflaging measures in the optical and IR spectrum. This emphasizes the need for a comprehensive approach to emissions control, passive defence measures and non-radar sensors.
When dealing with small Class I UA, flying relatively low and slow, personal self-protection might also rely on human visual detection and tracking or acoustic orientation to find air threats. Of course, this capability is less precise and less stress-resistant than technical solutions but can provide needed support in close range. However, this ‘last resort’ option might play a very important role in passive defence and alerting surrounding personnel.
Interceptors
After the detection of potential targets and the provision of a fire solution, an interceptor has to execute another link of the kill chain. The interceptor needs to be capable of denying the UA the ability to deliver effects, like reconnaissance or ordnance delivery. To effectively deny a UA access to an area, an SBAMD interceptor needs to deliver sufficient physical stress on the structure of the UA to render it non-operational.
Regular SBAMD interceptors, from the long-range PATRIOT to the very short-range MANTIS (Counter-Rocket, Artillery, Mortar (C-RAM)) can in theory cover a large subset of UA as well. The distinction should be made between Line-of-Sight (LOS) and Beyond-Line-of-Sight (BLOS) interceptors. BLOS interceptors for SBAMD purposes are missiles, and LOS interceptors can, in addition, be projectiles, directed energy or even simple nets. BLOS interceptors must be equipped with an active seeker or must be capable of receiving target information from a different sensor source.
Long-range interceptors, like a PATRIOT missile, are very well suited for HALE and MALE UA. These targets fly very high, relatively slow and are not very agile, so chances of evasive manoeuvres or hiding behind topography are non-existent. Medium-Range interceptors like NASAMS missiles3 are capable of targeting MALE UA, but might lack capabilities to reach all HALE UA. In general, SBAMD interceptors are capable of intercepting UA which operate in their battlespace and where the SBAMD system has created a fire solution. However, as with other air tracks, this becomes more complicated when the targets fly low or can execute evasive manoeuvres before the actual intercept.
The chance of a sensor losing track of very low flying UA due to topography increases with the distance the missile has to bridge. This can easily lead to unsuccessful engagements and the wasting of missiles. Missiles with active seekers will most likely engage low-flying UA from the above, which is a problem for many seekers, due to background noise and signal reflections from the ground. This could also lead to unsuccessful engagements. In general, engaging rotary-wing UA designs over long distances shows little promise, due to their ability of rapid descends and generally very low flight altitudes.
Just because a UA could be engaged by SBAMD systems, does not mean it is a good idea to do so in general, outside of a last resort self-defence situation. SBAMD interceptors, especially long-range missiles, are very expensive, very limited in stock and take a long time to replace. Engaging potentially mass-produced, relatively cheap, easy to replicate UA with a multimillion-dollar missile does not seem cost-effective. Adversaries might otherwise use this tactic to deplete our resources to reduce our overall control of the airspace. Especially in the case of UA swarm operations, where attrition is a calculated factor, the right choice of the interceptor is crucial. Long or medium-range SBAMD missiles will not be able to deliver a reasonable cost-benefit effect on UA swarms and will likely result in the waste of missiles that are possibly needed for other threats.
LOS systems like C-RAM seem very capable of intercepting UA in their respective battlespace. However, since the bullets are not guided, and C-RAM systems were designed to counter targets with steady flight paths, the general effectiveness of such systems looks promising but needs to be evaluated. Most systems fire numerous shots with airburst munitions to increase the chances of hitting the target. An adequate shot doctrine for dedicated UA needs to be identified. Another LOS solution is based on laser technology. Numerous nations (e.g. the Unites States4 and Germany5) are working on fielding short-range laser systems within the next few years. A Laser is less susceptible to target manoeuvring. Although the travel time for the light to the target is neglectable, the laser beam has to stay on the target for a certain amount of time to be effective. This highlights the challenge of precision beam steering.
There is still a significant subset of UA in all three classes that current SBAMD interceptors cannot engage. Also, since the battlespace of current AD interceptors, especially against smaller UA, won´t look like the perfect half sphere, as it is always depicted, the overall airspace that can be covered is quite limited and the intended defended area of longer-range systems becomes more of a point or self-defence scenario. This tremendously increases the need for more systems, otherwise, NATO will be significantly more vulnerable from these kinds of threats.
Command and Control Requirements
Every SBAMD system has a C2 element. This allows for SBAMD units to be integrated into a bigger AD system (e.g. NATO IAMD System) and to locally execute the ordered mission to control the air space. There can be active tasks, embedded in a planned defence design or reactive tasks in the form of self-defence or extended self-defence.
It needs to be assured that an SBAMD unit has all necessary ROE to execute the kill chain in a timely manner. For self-defence, this is always guaranteed by Article 51 of the United Nations Charter. For any other possible scenario, NATO and the nations have to provide a feasible legal framework in the form of ROEs for each unit/command/mission. This becomes more complicated when an SBAMD unit is deployed in a foreign nation, especially prior to a possible conflict. In this case, the legal framework for using military force and executing effective C2 needs to be coordinated and deconflicted with the host nation. Self-defence with application of military force is an appropriate response to an occurring armed attack, even in peacetime. However, UA can be used to prepare such an attack without posing a direct threat to anyone. Here, the so-called ‘Caroline Criteria’6 could be used to justify anticipatory self-defence against an imminent threat. With a clear military purpose for higher-class UA, the declaration of imminence should be less critical, but with the abundance of civil/recreational use of Class I UA, this will be an issue that needs a robust solution.
Also, the process from detection to engagement needs to be fast enough to be effective against a UA threat. High flying Class III UA are no different than regular air threats. However, the timelier a decision needs to be taken, the faster the C2 element needs to be, concerning the technical procedures and the engagement authorization.
In NATINAMDS, SBAMD units can be in various modes of operation (i.e. centralized, decentralized or autonomous), which puts the engagement authority on the appropriate level to optimize the air battle. Self-defence is always autonomous, but with UA defence the terms for extended self-defence and the embedding of UA defence in the overall air battle needs to be clearly defined to maintain control where possible and be flexible when necessary. However, the more time-critical an engagement decision is, especially with shrinking UA sizes, the more likely it is that the decision has to be taken in an autonomous mode of operation.
The use of UA can be enhanced by employing higher levels of autonomy or AI. This will allow, for example, intelligent swarming and highly reactive single systems. Any counter UAS C2 system will have to be able to make decisions at the speed of relevance. This will most likely force the integration of AI or at least smart algorithms in our own C2 systems as well. The ideas of a human-in-the-loop, human-on-the-loop or totally autonomous operations for C-UAS systems have to be clearly defined.
The integration of other services in a comprehensive approach against UA also needs to be considered. Therefore, the information/data from SBAMD systems which is necessary to feed these other processes, such as offensive targeting, must be identified. Also vice versa, other services might be able to provide intelligence/data to optimize the SBAMD battle. These interfaces and requirements need to be analyzed and perfected.
System Summary and Future Ideas
SBAMD systems are designed to cover certain threats within a defined spectrum. A lot of UA have similar characteristics with these threats. Therefore, SBAMD systems can be used to defend against some UA as well. The performance of SBAMD systems against this identified subset of air threats will be sufficient and reliable for defensive planning purposes. Some small procedural adaptations of SBAMD employment methods might even increase the overall effectiveness and efficiency of the entire AD system. However, a lot of UA do not fall in the categories of known threats or SBAMD systems can only cover a particular subset of UA. This has several consequences.
- Similar to Ballistic Missile Defence (BMD), UA defence cannot be looked at in isolation. A BMD capable system is always vulnerable to other air threats as is an SBAMD system to ballistic missiles. This means, when using SBAMD systems in a NATINAMDS context for UA defence, the UA have to be part of the layered defence design considerations with all other air threats, areas to be protected, and critical assets or critical ininfrastructure. Also, a clear gap analysis of active defence systems against the whole threat set needs to be compiled, to optimize mitigation efforts and to better protect the SBAMD systems themselves.
- Considering the capability gap of longer-range SBAMD systems against small UA at close ranges, C-RAM systems have an excellent potential to also serve as protective means for these SBAMD units. If an SBAMD unit is threatened by UA which they cannot engage, C-RAM is possibly the last and only resort. The concept of mixed/layered defence designs becomes even more critical with the added UA threat. This puts significant constraints on a defence design since the numbers of C-RAM systems are very limited. Either the deployment with SBAMD systems hampers the C-RAM mission or the AD design is restricted by C-RAM deployment locations. To maintain operational flexibility, either more systems need to be procured, or other means for UA protection need to be acquired.
- SBAMD systems are responsible for intercepting targets in the air, although some systems incorporate surface-to-surface operations within the limits of their interceptors (e.g. currently SM-6, or NIKE Hercules in the past). With modern, highly capable radar sensors, this idea might be worth studying, for immediate targeting or providing targeting data to other kill chains.
- For the past 30 years, the force protection community has been arguing that one of the biggest threats to SBAMD systems is not Anti-Radiation Missiles (ARM) but rather a team of Special Operations Forces (SOF), which can easily take out the radar and render any SBAMD unit non-operational for a significant amount of Today, the small Class I UA might be a good tool to be used by SOF as well. SBAMD means, even in a mixed/layered defence design, cannot adequately address this threat and protective measures have to be organized more like force protection than AD. This idea holds true for all Class I UA, which are capable of penetrating a C-RAM coverage. Adequate defence solutions need to be identified.
- A comprehensive defence strategy from wide-area airspace to individual personnel or system protection needs to be Defence gaps and mitigation measures need to be identified. To achieve that, the threat and threat perspective need to be unanimous. The following questions need to be answered before creating any defence design:
Which UA are to be expected in the area?
- How will these UA most likely be employed?
- Which UA can and need to be taken care of by SBAMD means?
- Which UA threaten SBAMD systems?
- Which UA can be taken care of by other means?
- Which information is needed from SBAMD systems to achieve this mission?
- What needs to be covered by passive defence measures to reduce consequences?
- What is the remaining risk for the SBAMD systems that needs to be calculated or addressed?
Insufficient answers to these questions will lead to uncertainties in defence planning and increase the risk of failure. This needs to be clearly addressed before preparing optimized leadership decisions. Realistically, there will always be a risk, especially with new threats, but risk mitigation requires the best possible SA.
Some future capabilities might help with mitigating the UA threat and take the stress from SBAMD systems or the overall defence design.
- Airborne sensors could help in various aspects:
- SA and cueing of SBAMD sensors.
- Potentially helping SBAMD sensors to remain mostly ‘silent’.
- Possibly identifying UA launch points, for smaller UA.
- Supporting passive defence measures with SA.
- Overhead, airborne sensors will have the problem of measuring against the surface, which increases clutter and other unwanted signals. This might hamper the detection and tracking, especially of very small and low/slow flying UA. Nevertheless, it should be analyzed, to determine whether these airborne sensors can help with the UA threat.
- Passive Sensors will play a significant role in UA defence. UA with a bi-directional guidance link or UA that transmit collected data will have a strong RF signature, which can be used by passive sensors for SA and warnings. Future developments might allow this data to be used for effective fire-solutions. Also, passive RF sensors might be able to locate the UA operator as well, if he uses an RF remote control. This would allow passive detection beyond visual For visual distances, optical sensors can be used for surveillance, tracking and possibly engagements. In even shorter ranges, acoustic sensors can support SA as well.
- Some UA are reliant on Global Positioning System (GPS) navigation. It should be analyzed how localized GPS jamming or spoofing could support the protection of SBAMD units.
- Airborne UA interceptors, employed with a yet to be identified concept of human-in-the-loop, human-on-the-loop or even AI-supported higher levels of autonomy might help in reducing reaction times and give an overhead advantage. A similar approach can be found with Destruction of Enemy Air Defence (DEAD) UA like HARPY or Maybe this concept can help to mitigate the UA threat as well. As a low-tech variant of this idea, the use of birds to hunt drones as is used in the Netherlands7 needs to be mentioned.
- BMD distinguishes between Hit-to-Kill (HtK), where the ballistic missile or the re-entry vehicle is completely destroyed, and a mission kill, where the target gets sufficiently affected to the point where it is unable to fulfil its mission. The same idea can be applied for UA Depending on the structural integrity of the UA, an incoming interceptor (as described below) will either completely destroy a target or at least render it non-operational, which would be like HtK. However, since the kill chain can be applied to several links of a UA operation, SBAMD sensor data can be used in a multi-domain approach as well, to support other kill chains, e.g. targeting the pilot or cyber-hacking the control link. This would constitute a ‘mission kill’.
- Some Class I UA, potentially targeting SBAMD systems, might be controlled by regular RF remote controls. It should be analyzed, if additional equipment with sensors covering the respective frequencies for general awareness or triangulation of the operator are beneficial. Other UA might be controlled by regular cell phone connections. Here it should be investigated if RF and cell phone jammers can be incorporated in SBAMD units to add additional protection. Their use before conflict will have to be in accordance with standing laws and regulations.
- UA might be controlled through satellite Since upper-tier interceptors developed to engage ballistic missiles in their mid-course phase are able to reach altitudes of some satellites, the use of SBAMD units for targeting the satellite control link might need to be looked at as well.
The trend of multi-domain threats is becoming more common. Therefore, the approach of looking at UA defence in isolation no longer applies. The defensive idea needs to be layered and must cover as many threat vectors as possible. This calls for more system interoperability, and due to very short decision timelines, more interconnectivity. The overall system needs to be able to provide timely information to the individual units, so that mission execution and SA for passive defence are optimized. Also, defensive weaknesses and capability gaps need to be known so that other mitigating measures can be planned.
Conclusion
Unmanned Aircraft cannot be considered emerging technology anymore, as they are a current reality. Due to their potential effectiveness, relative ease of employment and affordability, they are prone to evolve much faster than regular air threats. Also, it is far more likely to find wide-spread use of UA by our adversaries in upcoming NATO missions than the use of other new technologies, like hypersonic missiles. This is especially true for missions against non-peer opponents.
Therefore, the following issues/factors need to be considered:
- Stringent incorporation of UA defence in regular AD planning.
- Proper awareness of:
- Potential Red UA capabilities;
- Capabilities of Blue SBAMD against Red UA;
- Realistic capability gap and vulnerability analysis against UA;
- Addition of UA defence in force protection measures;
- Adapting Passive Defence measures to counter UA effects.
Since the capabilities of UA will evolve quickly, the field of counter-UAS needs to be on the cutting edge of current developments as well, otherwise, NATO will have a clear and decisive disadvantage in upcoming missions.